
D&F Systems Corporation Space Mission Cases
Unlocking the Secrets of the Cosmos
Micro-satellite
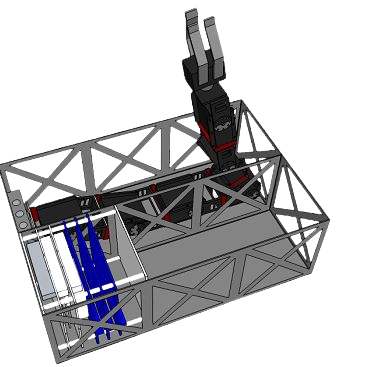
• Cubesatellite Robotics (CuBot)
◦ Investigate research topics to add robotic manipulators to small satellites.
▪ Generate simulations to model the manipulators and the attitude control system for maintaining the manipulator in place.
◦ Research potential emerging technologies used for sensing human gestures.
▪ Human body provides multiple motions that can be tracked to tell a robotic system to move or translate.
▪ The method provides the advantage to robotic manipulators in environments that are harsh for humans.
◦ Lead the development of sensor fusion (hand motion sensor) and the robotic arm actuators for controlling three degrees of freedom robotic arm.
▪ An algorithm was developed to control the robot actuators while another algorithm was written to send the commands due to the hand gesture motion.
▪ The software was developed to transmit the commands through a wireless system.
◦ Develop the project requirements and concept of operations (ConOps) for the robotic and satellite interaction.
▪ The mission plan provide the process by which the satellite will deploy the arm as well as the use cases for its use.
• Small Project Rapid Integration and Testing Environment (SPRITE) Laboratory
◦ Work in the development of a hardware in-the-loop (HIL) system for testing the flight software in an simulated environment for small satellites.
▪ The system is planned to ensure that any flight computer can be interfaced to a simulator replicating the hardware interfaces used by the flight computer.
▪ The control commands are obtained through another hardware interface so that the simulator emulates the small satellite motion.
▪ The data generated in the simulated is refactored to the sensors used by the computer.
▪ This method aids in characterizing the system performance prior launch.
◦ Develop MATLAB models about the satellite motion, attitude determination and control systems (ADCS), environments and sensors to test the flight computer of small satellites.
▪ These models are autocode to facilitate and to reduce the time for software integration in the hardware computer.
◦ Bring intern students to the laboratory for training into the methods for testing computer systems in a simulated environment..
▪ As part of the training process, the students learn how to program different microcontrollers used in small satellites (such as cubesats)
◦ Communicate and develop relationships between NASA, universities, private industry, and other government agencies to use the laboratory as a testing facility.
▪ This external outreach allows different entities access to use of the laboratory as a primary testing environment for small satellites for any government facilities, education institutions and private contractors.
• Demonstration of Formation Flying (DOFF) Mission Planning
◦ Develop the concept design for the formation flying satellite mission in LEO orbits.
▪ Analyze and Develop the attitude dynamic and control simulation for the DOFF project.
◦ Develop the flight software for the DOFF satellite.
▪ The flight software is designed so that it can maintain the satellite separation between satellites.
▪ A model-based design in MATALB/Simulink is developed to model and analyze the motion of multiple satellites ejecting from a main body.
◦ Support the mission planning with the data analysis to support the effort.
• Cubesatellite Robotics (CuBot)
◦ Investigate research topics to add robotic manipulators to small satellites.
▪ Generate simulations to model the manipulators and the attitude control system for maintaining the manipulator in place.
◦ Research potential emerging technologies used for sensing human gestures.
▪ Human body provides multiple motions that can be tracked to tell a robotic system to move or translate.
▪ The method provides the advantage to robotic manipulators in environments that are harsh for humans.
◦ Lead the development of sensor fusion (hand motion sensor) and the robotic arm actuators for controlling three degrees of freedom robotic arm.
▪ An algorithm was developed to control the robot actuators while another algorithm was written to send the commands due to the hand gesture motion.
▪ The software was developed to transmit the commands through a wireless system.
◦ Develop the project requirements and concept of operations (ConOps) for the robotic and satellite interaction.
▪ The mission plan provide the process by which the satellite will deploy the arm as well as the use cases for its use.
• Small Project Rapid Integration and Testing Environment (SPRITE) Laboratory
◦ Work in the development of a hardware in-the-loop (HIL) system for testing the flight software in an simulated environment for small satellites.
▪ The system is planned to ensure that any flight computer can be interfaced to a simulator replicating the hardware interfaces used by the flight computer.
▪ The control commands are obtained through another hardware interface so that the simulator emulates the small satellite motion.
▪ The data generated in the simulated is refactored to the sensors used by the computer.
▪ This method aids in characterizing the system performance prior launch.
◦ Develop MATLAB models about the satellite motion, attitude determination and control systems (ADCS), environments and sensors to test the flight computer of small satellites.
▪ These models are autocode to facilitate and to reduce the time for software integration in the hardware computer.
◦ Bring intern students to the laboratory for training into the methods for testing computer systems in a simulated environment..
▪ As part of the training process, the students learn how to program different microcontrollers used in small satellites (such as cubesats)
◦ Communicate and develop relationships between NASA, universities, private industry, and other government agencies to use the laboratory as a testing facility.
▪ This external outreach allows different entities access to use of the laboratory as a primary testing environment for small satellites for any government facilities, education institutions and private contractors.
• Demonstration of Formation Flying (DOFF) Mission Planning
◦ Develop the concept design for the formation flying satellite mission in LEO orbits.
▪ Analyze and Develop the attitude dynamic and control simulation for the DOFF project.
◦ Develop the flight software for the DOFF satellite.
▪ The flight software is designed so that it can maintain the satellite separation between satellites.
▪ A model-based design in MATALB/Simulink is developed to model and analyze the motion of multiple satellites ejecting from a main body.
◦ Support the mission planning with the data analysis to support the effort.
Frequently Asked Questions
Q:
What types of engineering services does D&F Systems Corporation offer?
We offer a comprehensive range of engineering services, including aerospace engineering, software development, IT consulting, and more.
Q:
How much do D&F Systems Corporation's engineering services cost?
Our pricing varies depending on the project scope and requirements. Contact us to discuss your specific needs and receive a personalized quote.
Q:
Does the company provide custom engineering solutions?
Yes, we offer customized engineering solutions tailored to meet your specific needs.
Q:
How can I contact D&F Systems Corporation for customer support?
You can contact us through our website's contact form, email, phone, or by visiting our office during business hours.
Follow Us
Our expert team of engineers provides innovative solutions for the aerospace industry, from design to testing and manufacturing. Contact us today to learn more about our comprehensive range of engineering services.
Contact Us
D&F Systems Corporation
Madison, Alabama
- Monday - Friday, 8:00 am - 5:00 pm
Copyright ©2023 D&F Systems Corporation. All rights reserved.